Lego Technic Articles
About Technic Brick Power
Hello I am Technic Brick Power and I am a massive Lego Technic Fan. It started when one day in 2012 I was given the Lego Techic 9396-1 "Helicopter" set for my birthday, and everything changed. I thought the set was amazing and I really got hooked on Technic - I soon started buying many more sets with the larger ones being some of my favourites, like the set 42055 - "Bucket Wheel Excavator", and set 42082-1 "Rough Terrain Crane".
In late 2019 I decided to take the plunge and start a Lego Technic YouTube channel. I specialize in Lego Technic MOC gearboxes, gearing systems and the more technical aspects of Lego Technic and share my ideas and findings on my YouTube channel. This has been very rewarding and has allowed me to learn and discover much more about Lego Technic than I realized there is to it.
The purpose of this website is to collate and share this information with all Lego Technic fans out there. I hope you are one of them.
Now of course I don't know everything and many of my designs have been improved from viewer feedback, so if you have questions or comments I'd love to hear from you. Please use to form below to get in contact.
Gearing Tool Update
I have updated the Gearing Ratio Calculator tool as follows:
- Fixed issues with knobbed wheel meshing
- Added CV joint support (ball and regular)
- Added wheel hub support
- Added a few steering wheels and fans and propellers
- Show linear speed based on the RPM and radius of the component
- Improved frame rate
Technic Elbow Art Tool
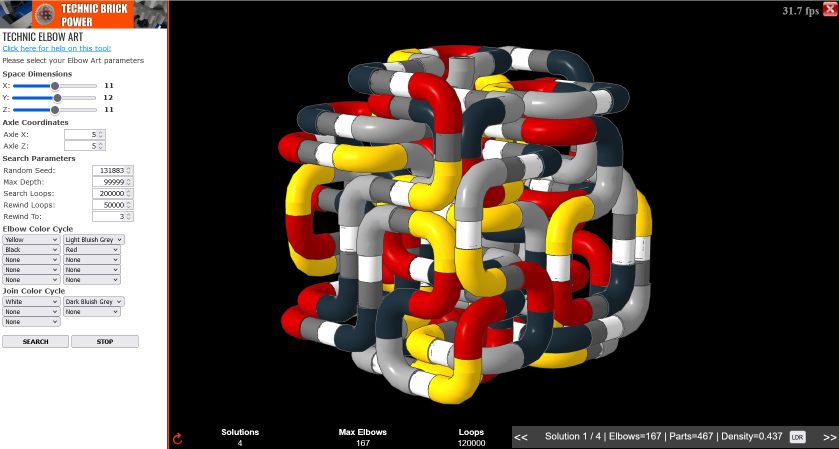
This fun tool is designed to search for "Elbow Art" solutions - these are artistic creations made out of a continuous sequence of connected Lego Technic "elbow" pieces (part number 25214) to create an intertwined spaghetti like model. Each step consists of adding a single elbow (with a length 2 axle to join it), an extended elbow (on a length 3 axle with a 1x1 liftarm), or an extra long extension (elbow joined with a length 4 axle and two 1x1 liftarms).

There are a number of adjustable parameters:
SPACE DIMENSIONS
X, Y, Z sliders. These set the dimensions of the search space that is being filled up. For example X=7, Y=10, Z=7 will try to fill a 10 high (Y dimension) box with a 7x7 base.
Loop. Tick this checkbox to create a continuous loop. If this is not checked the program will create an "axle mounted" piece of art that has a start and end point (see next paragraph on the axle coordinates).
Axle Coordinates: (Axle X and Axle Z). This option is only shown if you choose not to create a "loop". These are the coordinates of the "start" and "end" points of the elbow sequence. The idea of the design is that the resulting art piece can be mounted on an axle at the bottom and one at the top and rotated to create an interesting dynamic model. The X and Z coordinates of the axle are restricted to the be less than half of the X and Z dimensions due to the symmetry of the model. The coordinates start at (0,0).
SEARCH PARAMETERS
These are the parameters that can be set to alter the search algorithm. In general the number of solutions is incredibly large (exponential with the size of the search space) and cannot be searched in a practical amount of time. Therefore the search uses a few parameters to guide it and allows you try your luck with finding new records!
Random Seed. Since the search is randomized, this is simply a number that generates a predetermined "random" sequence and allows you to repeat the results of your search by using the same number. Change this parameter to try a different "lucky" search.
Max Elbows. This is the maximum number of elbows the search will try to fit into the space. If you want a less dense solution you can vary this parameter to limit the search to finding solutions with no more than this number of elbows. By setting this parameter you can also improve your chances of finding a record by making the search more efficient.
Search Loops. This is the number of search steps before the search terminates and presents the results (you can also press the"Stop" button to halt sooner). Increase this parameter to search for longer...
Rewind Loops. The search algorithm uses an exhaustive "brute force" approach meaning it will search across all possible solutions (eventually...if you have centuries to wait). It does this by placing pieces randomly and if no more pieces fit it undoes the last step and tries a different placement. This means most of the search time is spent on the "end" of the solution and the beginning will stay the same for a very long time. This parameter will "rewind" the solution back to near the beginning after this many steps. This allows the search to try a different starting sequence because if it began with a suboptimal starting sequence then it will not improve the final solution in a timely manner.
Rewind To. Once the "rewind loops" threshold has been reached the solution is rewound to the beginning with this many steps. For example a value of 4 would mean it will undo all steps back to the sequence that has just 4 elbows and continue from there with a new sequence for step 5.
ELBOW COLOUR CYCLE
Using these pulldown lists you can choose the sequence of elbow colours used in the model. Only available colours are shown.
JOIN COLOUR CYCLE
Here you can choose the colour cycles of the joins.
CONTROLS & BUTTONS
Use the "Search" button to start the search. Use "Stop" to stop it. Once solutions have been found you can use the "<<" and ">>" buttons to step through the solutions (bottom right of screen). Press the "LDR" button to download the LDR file of your solution.
SETTING RECORDS
Records are measured by the number of elbow pieces fitted into the selected space and axle coordinates. If you find a record you can enter your name and location (e.g. country)!
Good luck and enjoy.
Click here to try the tool.
TOOLS
Gearing Ratio Calculator
Check out the Beta version my Lego Technic Gearing Ratio Calculator Tool:
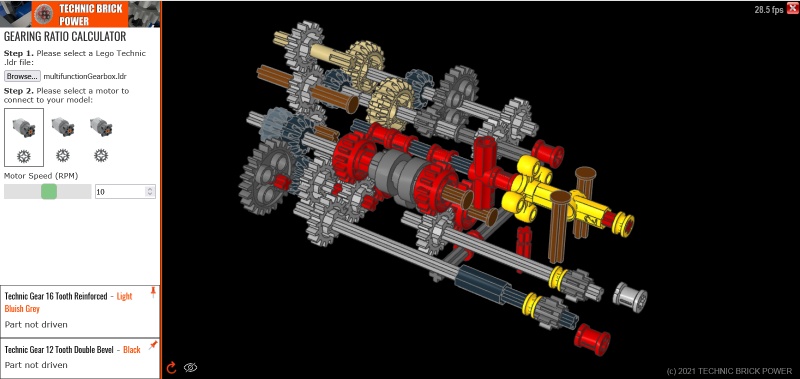
This tool allows you to upload your Lego Technic project .ldr file and analyse the gearing ratios between any two connected gears or axles. Currently supports most gears, axles, worm gears, some differentials, cv joints and universal joints. See the video tutorial on how to use it. It is a work in progress and I would love to hear your feedback on it. Click here to try it out.
Note: As of 25 Septemeber 2021 the tool supports CV joints, linear speed via the radius of the component and improves on the frame rate for higher numbers of parts in a model).
Technic Elbow Art
This is a tool to create "Lego Technic Elbow Art" - a series of intertwined elbow pieces as a single sequence. Choose your dimensions and search parameters and search for new dense solutions and set a record!
Download your Elbow Art as an .ldr file and build it yourself. Click here to try it out!