Gearing Ratio Calculator Tool Help
This tool has been designed to simulate and analyse the gearing components of your Lego Technic model. It will calculate the gearing ratios between all connected components and visually show the gears of the model in action. It is best used from a laptop or desktop computer running the Firefox or Chrome browser.
You can access the Gearing Ratio Calculator Tool here.
To get started you need to load your model's .ldr (Lego Draw) file into the tool. Depending on how you created your model, you should be able to export it as an .ldr file from the program you have used to edit it. For example Bricklink Studio allows you export to the .ldr format from the File menu.
1. Load your LDR file
Just click the file "Browse" button near the top left of the screen.
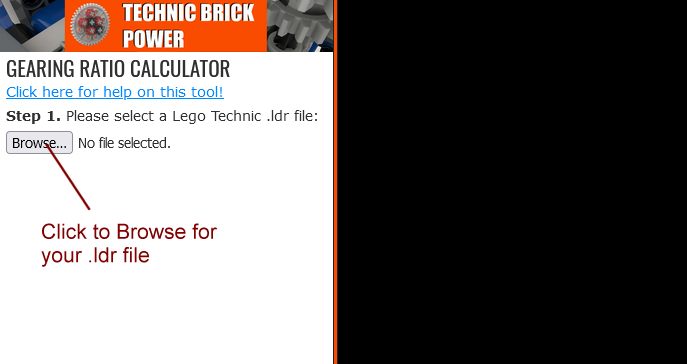
Once you have selected your file it will be loaded into the tool and displayed on screen. Note: Only gearing parts are loaded, e.g. axles, gears, differentials, connectors etc. - supporting parts are not shown.
You can rotate the view of your model using the mouse. Hold down the right mouse button and move the mouse to rotate the model. Hold down the left mouse and move the mouse to pan. Use the scroll wheel to zoom in and out.
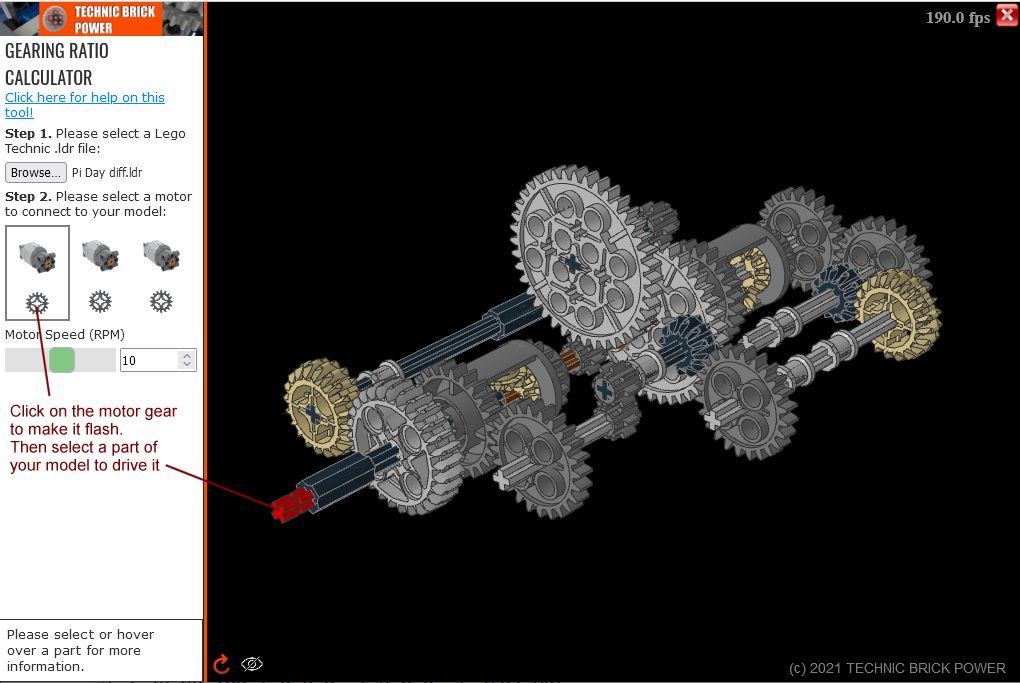
2. Connect a motor
To connect a motor to your model simply click one of the 3 motor gears (16 tooth gear). I will start flashing and the mouse cursor will change to a target symbol. Now move the mouse and click on the part you wish to drive with the motor. Once you have selected a part it will start rotating and flash green (meaning it is the driven part). All of the connected gears will start rotating with the correct gearing ratios and speeds relative to the driven part.
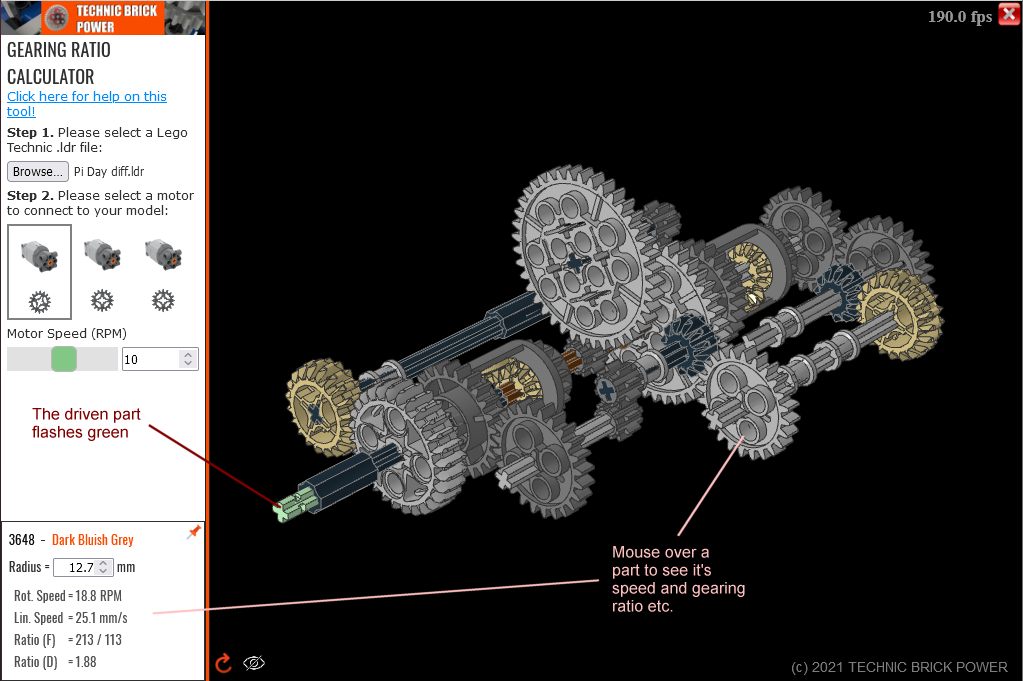
3. View parts of interest
Once you have connected a motor to your model and the gears are turning you can mouse over any part to see the relative speed and gearing ratio of that part compared to the part being driven. You can change the speed of the motor with the slider. You can connect more than one motor if your model allows. The following information is shown:
| Item | Explanation |
| Rot. Speed | Speed of rotation in RPM (revolutions per minute) |
| Lin. Speed | The linear speed of the component if it acted like a wheel. So for example this would measure the speed of a car if the part is a wheel |
| Ratio (F) | The gearing ratio relative to the driven part as a fraction |
| Ratio (D) | The gearing ratio relative to the driven part as a decimal |
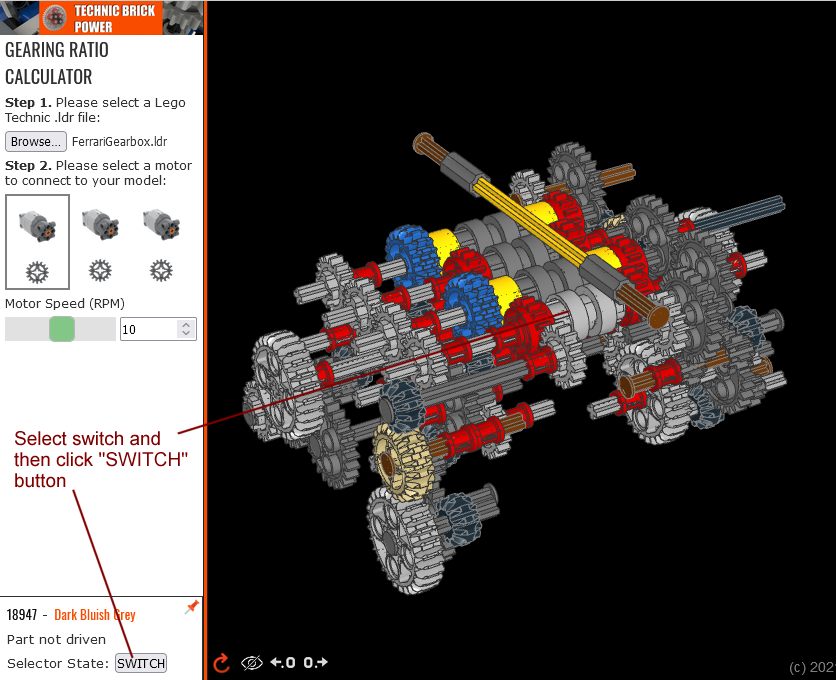
Driving Rings
If you have driving rings in your model you can switch them by selecting the driving ring (click on it) and then pressing the SWITCH button that appears at the bottom left.
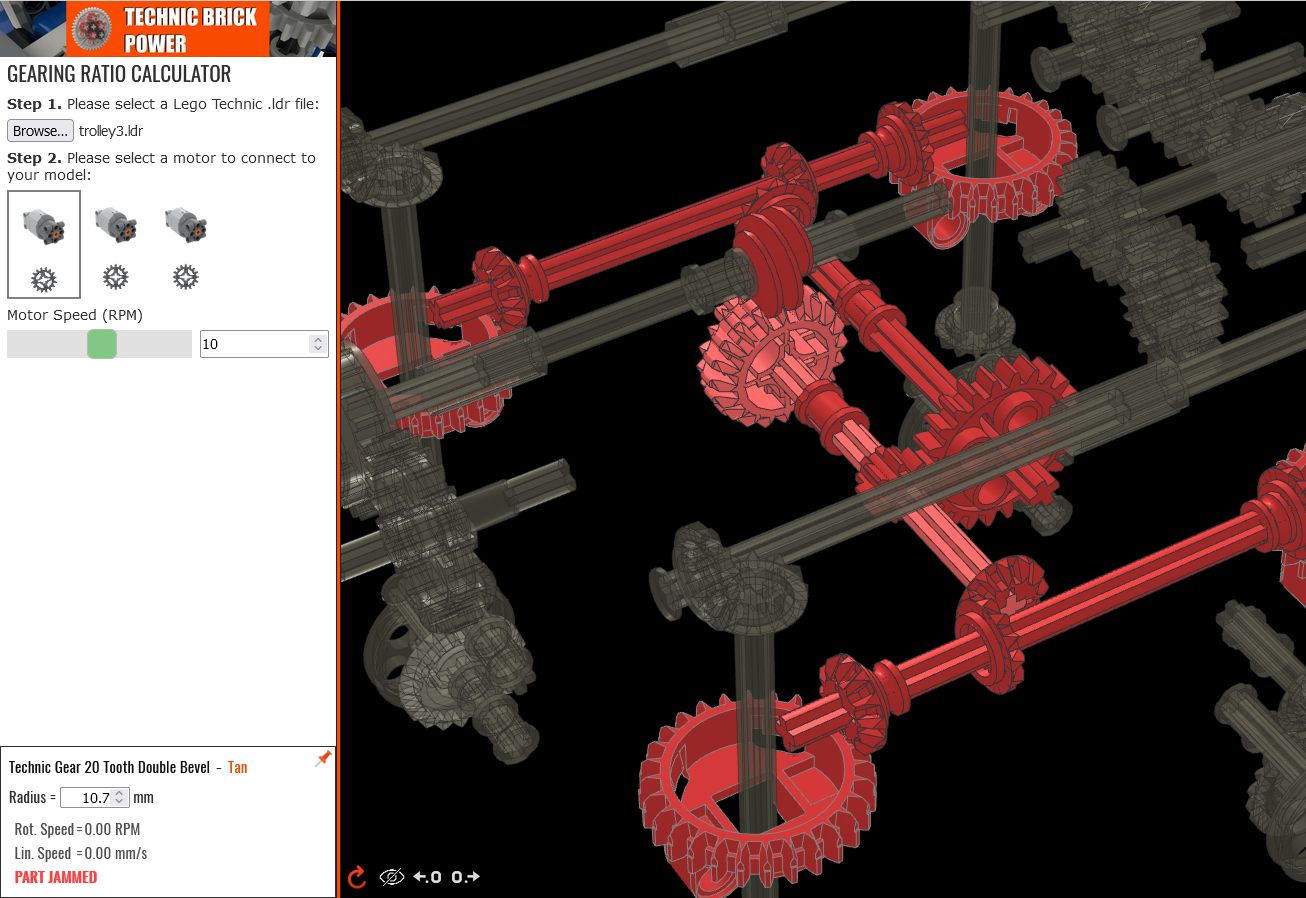
Gear Jam
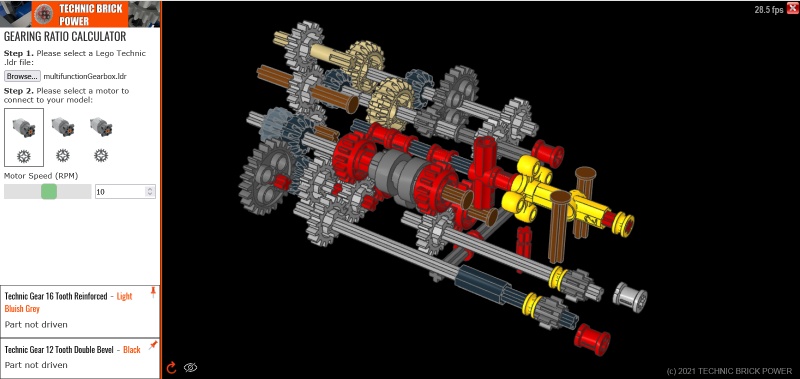
If you connect more than one motor to your model that are in conflict or are driving a worm gear in the wrong direction then the affected parts will flash red. See the example picture below.
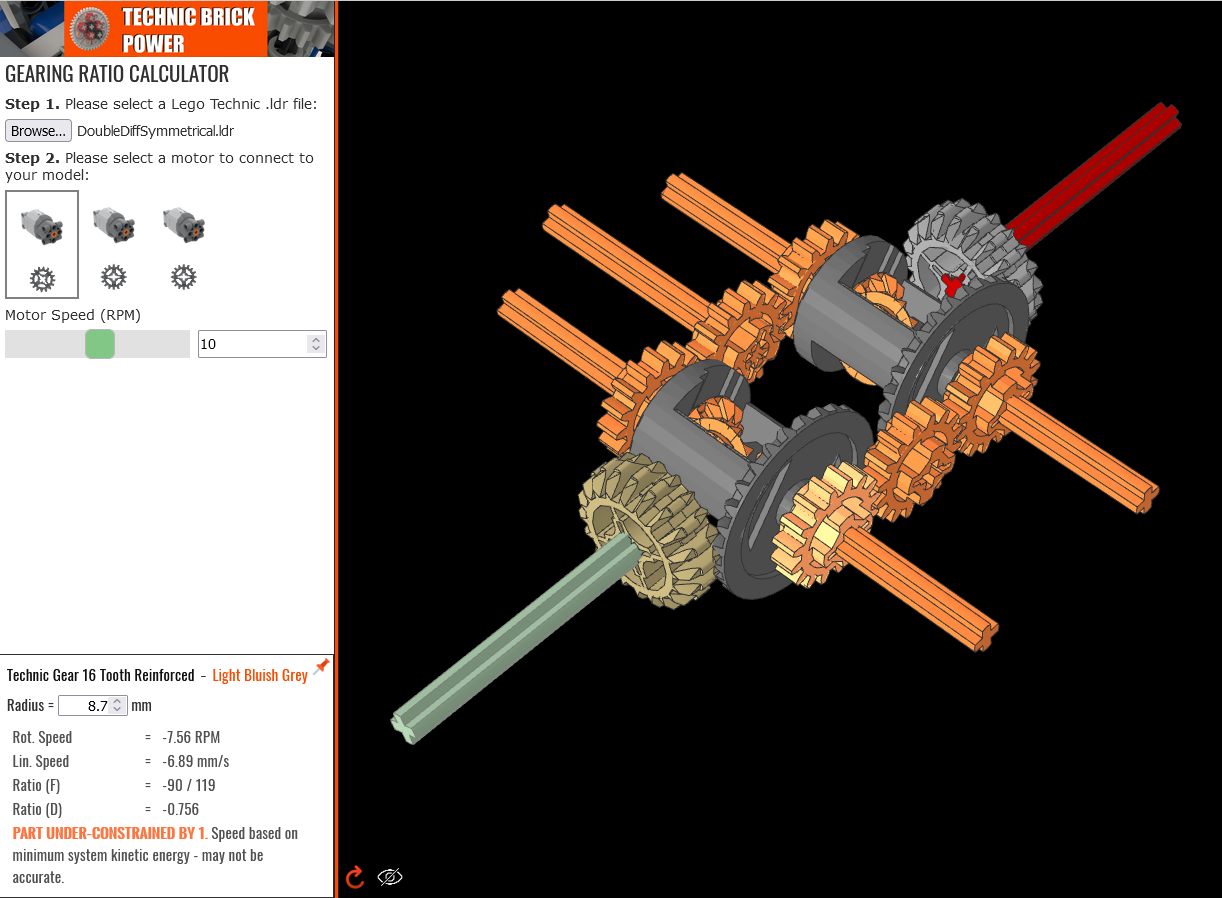
Underconstrained Gears
If you have a gear model with more than one degree of freedom (i.e. due to a differential) then the affected gears will flash orange. That means the gear speeds/ratios cannot be fully resolved. You can resolve these gears by adding another motor. The speeds and ratios displayed will then be in terms of the two motor speeds combined.
Supported Parts
Not all Lego Technic gearing parts are supported. The tool only supports rotational movement (i.e. not steering racks, linear movement etc). The following types parts are currently supported:
axles, flat gears, bevel gears, crown gears, worm gears, universal joins, turntables, driving rings, clutch gears, cv joins, knobbed wheels, differentials, axle connectors, chains, sprocket wheels, tracks, fans.
Unsupported Parts
The following parts are currently unsupported as well as any linear movement, or secondary rotation movement (e.g. pieces attached to pin holes of gears etc).
Most wheels, rotary catches, steering racks, engine shafts and pistons.
More to explore
Lego Technic Gearing Ratio Calculator Tool

Here I present my new Lego Technic Gearing Ratio Calculator tool. This tool allows you to upload your Lego Technic .ldr (Lego Draw) file and it will simulate the gearing system and visualize it as well as showing the gearing ratios relative to the input component.
The tool can be accessed...read more
Lego Technic New 12/20 Gear High Speed Friction Test

The Lego Technic set 42140 App-Controlled Transformation Vehicle introduces two new gears - a flat version of the 12 tooth bevel gear and a flat version of the 20 tooth bevel gear. These gears are designed to have less friction.
In this follow up video I measure the high speed difference ...read more
New Flat 12/20 Gear Friction

The Lego Technic set 42140 App-Controlled Transformation Vehicle introduces two new gears - a flat version of the 12 tooth bevel gear and a flat version of the 20 tooth bevel gear. These gears are designed to have less friction.
In this video I measure the difference in gearing efficiency...read more
Lego Technic Pi Day Machine

Here I present a Pi Day special Lego Technic machine that produces a gearing ratio of Pi/8 using a 56mm wheel driving a 13x13 square wheel.
The correctness of the ratio is confirmed by matching it with output of a 2 differential gearing system that produces a ratio of 355/9...read more
Measuring Gearbox Efficiency

This video describes a method for measuring the efficiency of a gearbox using the Lego Technic Powered Up hub. Gearbox efficiency is defined as the ratio of the output power to the input power and here I show how to measure each of these values to allow you to calculate the overall efficiency.read more
Lego Technic Gearing Ratio Tool Update

This video presents updates to the Technic Brick Power Lego Technic Gearing Ratio Calculator tool specifically on underconstrained differential systems. These are systems in which the differentials are not fully constrained and therefore have 1 or more degrees of freedom within them.
The ...read more
Lego Technic torque in practice - how to work with torque in automatic gearbox design

n this video I present a ten level Lego Technic torque creation gadget for testing lego power function motors and automatic gear switching mechanisms. The effect of torque on a large lego PF motor is tested against the theoretical power curve to compare the optimal gear switching point in practic...read more
Lego Technic 3 Speed Automatic Gearbox

Here a Lego Technic 3 speed automatic gearbox is presented. The gearbox automatically switches between one of 3 gear ratios, namely a ratio of 1, 1/3rd and 1/9th depending on the load on the output. It uses two 2 speed automatic transmissions in series to create the three speed automatic ge...read more
How to use a Lego Technic differential for creating prime gear ratios for MOCs. Part 1

Here I discuss techniques for creating prime number gear ratios such as 17:1, 19:1, 23:1, and 53:1 using a Lego Technic differential. Learn the mathematical relationship between the gear to create your own MOC desired ratios. Use this lego differential tutorial to design your own lego gear ratios...read more
How to measure a Lego Technic Crane's Efficiency. The results surprised me!

Here I demonstrate how to measure the efficiency of a Lego Technic MOC crane using basic physics. Efficiency is the ratio of the useful energy output (the potential energy put added to the weight) the to the input energy (power source power). The efficiency curve is interesting and does not look ...read more