How do you make a 1:4 gearing ratio?
To make a 1:4 gearing ratio you need to drive a gear that has four times as many teeth as the driving gear. Unfortunately there are no pairs of gears in Lego Technic that have this ratio. If there was a 32 tooth gear then you could drive that with an 8 tooth gear to make the 1:4 gearing ratio, but unfortunately that gear has not yet been created by Lego.
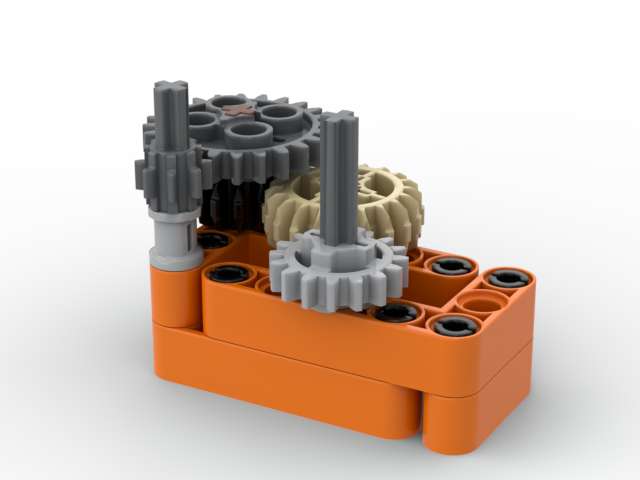
Instead you need to make 1:4 using a gear train of other gears. The most obvious is just two 1:2 gearing ratios in series (1/2 x 1/2 = 1/4) as shown in the diagram below:

Here the gearing ratio is 1:4 between the two reddish-brown axles. The design uses two 12 tooth gears and two 24 tooth gears. The gears can be laid out differently to create a different spacing between the two axles.
Another solution is to place in series a 1:3 gearing ratio followed by a 3:4 gearing ratio. When you multiply these together (1/3 x 3/4) you also get 1:4. To create a 3:4 gearing ratio you can drive a 12 tooth gear onto a 16 tooth gear. Unfortunately you cannot easily directly drive a 12 onto a 16 but it can be done with a 20 tooth intermediate gear. A 1:3 can be created simply with an 8 tooth gear driving a 24 tooth gear so the final design is shown below:
Here the gearing ratio is 1:4 between the left and right axles. This design uses 5 gears instead of the 4 above but has a spacing of 3 units between the axles and the reverse direction on the output axle which may be desirable.
Another solution is to drive an 8 tooth gear with a worm gear and then to finish that with a 2:1 gearing ratio so that 1/8 x 2/1 = 1/4.
More to explore
How do you make a 1:7 gearing ratio?
What is an intermediate gear?
Gearing Ratio Calculator Tool Help
How do you make a 1:N gearing ratio?
How do you make a 1:5 gearing ratio?
Lego Technic Gearing Ratio Tool Update

This video presents updates to the Technic Brick Power Lego Technic Gearing Ratio Calculator tool specifically on underconstrained differential systems. These are systems in which the differentials are not fully constrained and therefore have 1 or more degrees of freedom within them.
The ...read more