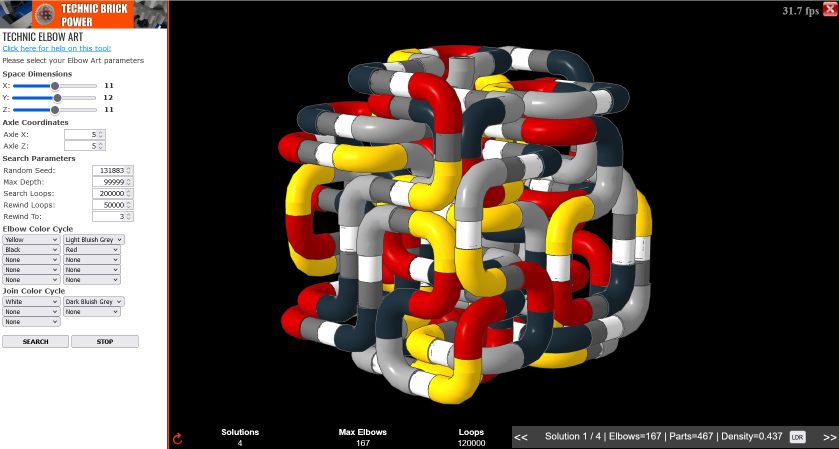
Technic Elbow Art Tool
This fun tool is designed to search for "Elbow Art" solutions - these are artistic creations made out of a continuous sequence of connected Lego Technic "elbow" pieces (part number 25214) to create an intertwined spaghetti like model. Each step consists of adding a single elbow (with a length 2 axle to join it), an extended elbow (on a length 3 axle with a 1x1 liftarm), or an extra long extension (elbow joined with a length 4 axle and two 1x1 liftarms).

There are a number of adjustable parameters:
SPACE DIMENSIONS
X, Y, Z sliders. These set the dimensions of the search space that is being filled up. For example X=7, Y=10, Z=7 will try to fill a 10 high (Y dimension) box with a 7x7 base.
Loop. Tick this checkbox to create a continuous loop. If this is not checked the program will create an "axle mounted" piece of art that has a start and end point (see next paragraph on the axle coordinates).
Axle Coordinates: (Axle X and Axle Z). This option is only shown if you choose not to create a "loop". These are the coordinates of the "start" and "end" points of the elbow sequence. The idea of the design is that the resulting art piece can be mounted on an axle at the bottom and one at the top and rotated to create an interesting dynamic model. The X and Z coordinates of the axle are restricted to the be less than half of the X and Z dimensions due to the symmetry of the model. The coordinates start at (0,0).
SEARCH PARAMETERS
These are the parameters that can be set to alter the search algorithm. In general the number of solutions is incredibly large (exponential with the size of the search space) and cannot be searched in a practical amount of time. Therefore the search uses a few parameters to guide it and allows you try your luck with finding new records!
Random Seed. Since the search is randomized, this is simply a number that generates a predetermined "random" sequence and allows you to repeat the results of your search by using the same number. Change this parameter to try a different "lucky" search.
Max Elbows. This is the maximum number of elbows the search will try to fit into the space. If you want a less dense solution you can vary this parameter to limit the search to finding solutions with no more than this number of elbows. By setting this parameter you can also improve your chances of finding a record by making the search more efficient.
Search Loops. This is the number of search steps before the search terminates and presents the results (you can also press the"Stop" button to halt sooner). Increase this parameter to search for longer...
Rewind Loops. The search algorithm uses an exhaustive "brute force" approach meaning it will search across all possible solutions (eventually...if you have centuries to wait). It does this by placing pieces randomly and if no more pieces fit it undoes the last step and tries a different placement. This means most of the search time is spent on the "end" of the solution and the beginning will stay the same for a very long time. This parameter will "rewind" the solution back to near the beginning after this many steps. This allows the search to try a different starting sequence because if it began with a suboptimal starting sequence then it will not improve the final solution in a timely manner.
Rewind To. Once the "rewind loops" threshold has been reached the solution is rewound to the beginning with this many steps. For example a value of 4 would mean it will undo all steps back to the sequence that has just 4 elbows and continue from there with a new sequence for step 5.
ELBOW COLOUR CYCLE
Using these pulldown lists you can choose the sequence of elbow colours used in the model. Only available colours are shown.
JOIN COLOUR CYCLE
Here you can choose the colour cycles of the joins.
CONTROLS & BUTTONS
Use the "Search" button to start the search. Use "Stop" to stop it. Once solutions have been found you can use the "<<" and ">>" buttons to step through the solutions (bottom right of screen). Press the "LDR" button to download the LDR file of your solution.
SETTING RECORDS
Records are measured by the number of elbow pieces fitted into the selected space and axle coordinates. If you find a record you can enter your name and location (e.g. country)!
Good luck and enjoy.
Click here to try the tool.
More to explore
Lego Technic Elbow Art

This video presents an online program for generating loops out of Lego elbow pieces. Elbow pieces (part #25214) are used in many Lego Technic models as a decorative part to create tube like structures. You can search for loops within different sized spaces and set the number of elbow pieces to be...read more
How to use a Lego Technic Differential for your MOC Part 2: Computer Generated Solutions

In this video I present optimal computer generated solutions for designing 1:N (N=prime) ratios using a single Lego Technic differential. Insights and ideas are shown for implementing the 1:N designs in practice using Lego Technic liftarms with an example 421:1 gear ratio device. All the possible...read more
How to use a Lego Technic differential for creating prime gear ratios for MOCs. Part 1

Here I discuss techniques for creating prime number gear ratios such as 17:1, 19:1, 23:1, and 53:1 using a Lego Technic differential. Learn the mathematical relationship between the gear to create your own MOC desired ratios. Use this lego differential tutorial to design your own lego gear ratios...read more
Spirograph Machine

Here I present a Lego Technic Spirograph machine programmed using Powered Up. The powered up controller is used to maintain the desired gearing ratio between the turn table and the inner gear to draw a spirograph that replicates the real original spirograph drawing toy.
...read moreLego Technic New 12/20 Gear High Speed Friction Test

The Lego Technic set 42140 App-Controlled Transformation Vehicle introduces two new gears - a flat version of the 12 tooth bevel gear and a flat version of the 20 tooth bevel gear. These gears are designed to have less friction.
In this follow up video I measure the high speed difference ...read more
New Flat 12/20 Gear Friction

The Lego Technic set 42140 App-Controlled Transformation Vehicle introduces two new gears - a flat version of the 12 tooth bevel gear and a flat version of the 20 tooth bevel gear. These gears are designed to have less friction.
In this video I measure the difference in gearing efficiency...read more
Lego Technic Pi Day Machine

Here I present a Pi Day special Lego Technic machine that produces a gearing ratio of Pi/8 using a 56mm wheel driving a 13x13 square wheel.
The correctness of the ratio is confirmed by matching it with output of a 2 differential gearing system that produces a ratio of 355/9...read more
Lego Technic 100 Part 4 Speed Gearbox

This video shows how to make a Lego Technic 4 Speed gearbox using 100 parts. The gearbox is a manual gearbox makes gearing ratios of 1/3, 5/9, 1/1 and 5/3.
The gearbox is demonstrated by hand and by using a Lego Technic Large Power functions motor.
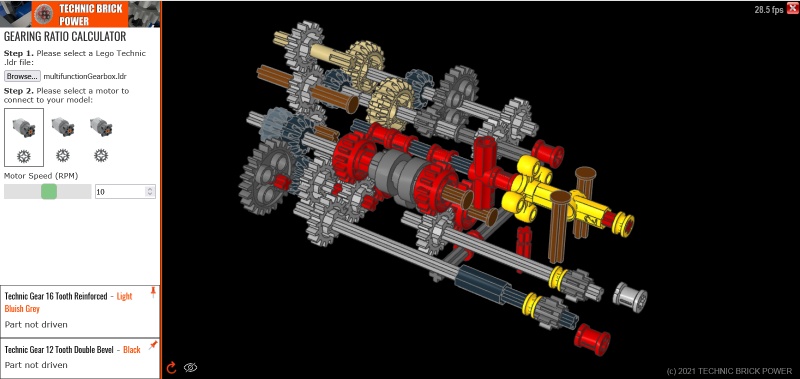
...read moreGearing Ratio Calculator Tool Help
Lego Technic Powered Up Tutorial 2 - Speed Control

This is my second Lego Technic Powered Up Tutorial that focusses on Lego Technic motor speed control using the Powered Up hub and Powered Up programming interface. The Lego Powered Up App is run on a Samsung Android tablet. I demonstrate how to set and control the power level applied to a motor.<...read more